- Llámenos al:
- 609123523
- 633042202
- marcpal@marcpal.es
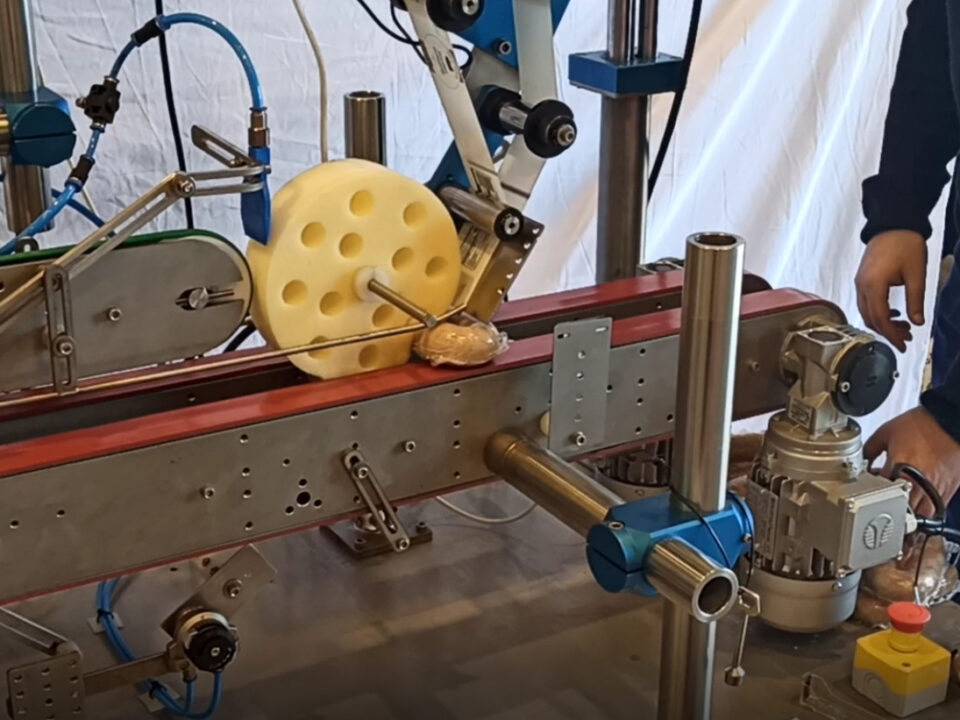
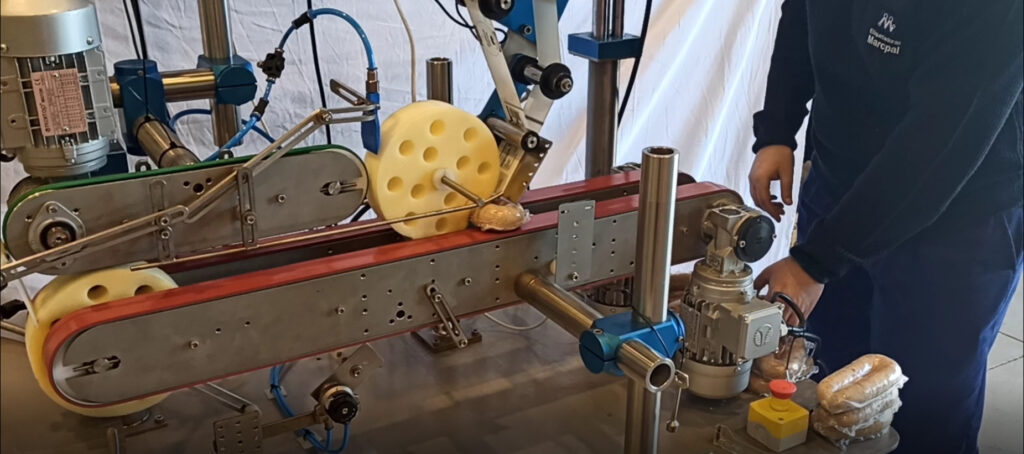
Nuevo proyecto entregado mediante aplicación de robot, sobre amortiguadores

Con una capacidad de etiquetado de 3.600 ud por hora, supera las expectativas del cliente.
26/11/2019
Etiquetadoras Marcpal les desea unas felices Fiestas y Próspero Año Nuevo.
19/12/2019
Nuevo proyecto entregado mediante aplicación de robot, sobre amortiguadores.
El equipo imprime la etiqueta y el brazo robot, la coloca en su sitio, con total precisión


{kind=link}